أنظمة التحكم الآلي الأمثل. التحكم الأمثل في العمليات (محاضرة) مهمة وهدف إدارة نظم الإنتاج
لتصميم نظام التحكم الآلي الأمثل، يلزم الحصول على معلومات كاملة حول المضخم التشغيلي والتأثيرات المزعجة والرئيسية، والحالات الأولية والنهائية للمضخم التشغيلي. بعد ذلك، تحتاج إلى تحديد معيار الأمثلية. يمكن استخدام أحد مؤشرات جودة النظام كمعيار. ومع ذلك، فإن متطلبات مؤشرات الجودة الفردية عادة ما تكون متناقضة (على سبيل المثال، يتم تحقيق زيادة دقة النظام عن طريق تقليل هامش الاستقرار). بالإضافة إلى ذلك، يجب أن يحتوي النظام الأمثل على الحد الأدنى من الأخطاء الممكنة، ليس فقط عند تنفيذ إجراء تحكم محدد، ولكن طوال وقت تشغيل النظام بأكمله. وينبغي أيضا أن يؤخذ في الاعتبار أن حل مشكلة التحكم الأمثل لا يعتمد فقط على هيكل النظام، ولكن أيضا على معلمات العناصر المكونة له.
يتم تحديد الأداء الأمثل لـ ACS إلى حد كبير من خلال كيفية تنفيذ التحكم بمرور الوقت، أو ما هو البرنامج، أو خوارزمية التحكم.في هذا الصدد، لتقييم الأمثلية للأنظمة، يتم استخدام معايير متكاملة، يتم حسابها كمجموع قيم معلمة جودة النظام التي تهم المصممين طوال فترة عملية التحكم.
اعتمادا على معيار الأمثلية المعتمد، يتم النظر في الأنواع التالية من الأنظمة المثلى.
1. الأنظمة, الأمثل للأداء، والتي توفر الحد الأدنى من الوقت لنقل المرجع من حالة إلى أخرى. في هذه الحالة، يبدو معيار المثالية كما يلي:
حيث / n و / k هما لحظات بداية ونهاية عملية التحكم.
في مثل هذه الأنظمة، تكون مدة عملية التحكم ضئيلة. أبسط مثال هو نظام التحكم في المحرك الذي يوفر الحد الأدنى من الوقت للتسارع إلى سرعة معينة، مع مراعاة جميع القيود الحالية.
2. الأنظمة, الأمثل من حيث استهلاك المواردوالتي تضمن الحد الأدنى من المعايير

أين ل- معامل التناسب؛ ش (ر)- عمل السيطرة.
يضمن نظام إدارة المحرك هذا، على سبيل المثال، الحد الأدنى من استهلاك الوقود خلال فترة التحكم بأكملها.
3. الأنظمة, الأمثل من حيث خسائر السيطرة(أو الدقة)، والتي توفر الحد الأدنى من أخطاء التحكم بناءً على المعيار حيث e(f) هو الخطأ الديناميكي.

من حيث المبدأ، يمكن حل مشكلة تصميم نظام التحكم الآلي الأمثل بأبسط طريقة لتعداد جميع الخيارات الممكنة. وبطبيعة الحال، تتطلب هذه الطريقة الكثير من الوقت، ولكن أجهزة الكمبيوتر الحديثة تجعل من الممكن استخدامها في بعض الحالات. لحل مشاكل التحسين، تم تطوير طرق خاصة لحساب التفاضل والتكامل (الطريقة القصوى، طريقة البرمجة الديناميكية، وما إلى ذلك)، والتي تجعل من الممكن مراعاة جميع قيود الأنظمة الحقيقية.
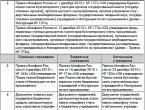
على سبيل المثال، دعونا نفكر في ما يجب أن يكون عليه التحكم الأمثل في السرعة لمحرك كهربائي يعمل بالتيار المستمر إذا كان الجهد المورد إليه محدودًا بقيمة الحد (/lr، ويمكن تمثيل المحرك نفسه كوصلة غير دورية من الدرجة الثانية (الشكل .13.9, أ).
الطريقة القصوى تسمح لك بحساب قانون التغيير ش (د)،ضمان الحد الأدنى من الوقت لتسريع المحرك حتى سرعة الدوران (الشكل 13.9، ب).يجب أن تتكون عملية التحكم في هذا المحرك من فترتين، في كل منهما الجهد ش (ر)يأخذ الحد الأقصى لقيمته المسموح بها (في الفاصل الزمني 0 - /،: ش (ر)= +?/ ex، في الفاصل الزمني /| - / 2: ش (ر)= -?/ pr)* لضمان هذا التحكم، يجب تضمين عنصر التتابع في النظام.
مثل الأنظمة التقليدية، الأنظمة المثالية هي الحلقة المفتوحة، والحلقة المغلقة، والمدمجة. إذا كان التحكم الأمثل الذي ينقل المضخم التشغيلي من الحالة الأولية إلى الحالة النهائية ويكون مستقلاً أو يعتمد بشكل ضعيف على التأثيرات المزعجة يمكن تحديده كدالة للوقت ش= (/(/)، ثم نبني نظام الحلقة المفتوحةالتحكم في البرنامج (الشكل 13.10، أ).
تم تضمين البرنامج الأمثل P، المصمم لتحقيق الحد الأقصى من معيار الأمثلية المقبول، في جهاز برنامج PU. وفقا لهذا المخطط، يتم تنفيذ الإدارة

أرز. 13.9.
أ- مع جهاز تحكم مشترك؛ ب -مع وحدة تحكم ذات مستويين
جهاز
أرز. 13.10. مخططات الأنظمة المثلى: أ- يفتح؛ ب- مجموع
استخدام آلات يتم التحكم فيها رقميًا وروبوتات بسيطة، وإطلاق الصواريخ في المدار، وما إلى ذلك.
الأكثر تقدمًا، على الرغم من أنها الأكثر تعقيدًا أيضًا، هي النظم المثلى مجتمعة(الشكل 13.10، ب).في مثل هذه الأنظمة، تنفذ الحلقة المفتوحة التحكم الأمثل وفقًا لبرنامج معين، بينما تقوم الحلقة المغلقة، المُحسّنة لتقليل الأخطاء، بمعالجة انحراف معلمات الإخراج. وباستخدام حبل قياس الاضطراب /*، يصبح النظام ثابتًا فيما يتعلق بالمجموعة الكاملة من تأثيرات القيادة والمؤثرات المزعجة.
من أجل تنفيذ نظام التحكم المثالي هذا، من الضروري قياس جميع التأثيرات المزعجة بدقة وسرعة. ومع ذلك، فإن هذا الاحتمال ليس متاحا دائما. وفي كثير من الأحيان، لا يُعرف سوى بيانات إحصائية متوسطة عن التأثيرات المزعجة. في كثير من الحالات، خاصة في أنظمة التحكم عن بعد، حتى القوة الدافعة تدخل النظام مع الضوضاء. وبما أن التداخل هو، بشكل عام، عملية عشوائية، فمن الممكن التركيب فقط النظام الأمثل إحصائيامثل هذا النظام لن يكون الأمثل كلتنفيذ محدد لعملية التحكم، ولكنه سيكون في المتوسط الأفضل لمجموعة تطبيقاتها بأكملها.
بالنسبة للأنظمة المثلى إحصائيا، يتم استخدام التقديرات الاحتمالية المتوسطة كمعايير الأمثلية. على سبيل المثال، بالنسبة لنظام التتبع المُحسّن للحد الأدنى من الأخطاء، يتم استخدام التوقع الرياضي للانحراف التربيعي لتأثير الإخراج عن القيمة المحددة كمعيار إحصائي لتحقيق الأمثلية، أي. التباين:
كما يتم استخدام معايير احتمالية أخرى. على سبيل المثال، في نظام اكتشاف الهدف، حيث يكون وجود الهدف أو عدمه هو المهم فقط، يتم استخدام احتمالية اتخاذ قرار خاطئ كمعيار الأمثلية روش:
أين ص ص ts هو احتمال فقدان الهدف؛ ص لو- احتمال الكشف الكاذب.
في كثير من الحالات، يتبين أن أنظمة التحكم الآلي الأمثل المحسوبة يكون من المستحيل عملياً تنفيذها بسبب تعقيدها. كقاعدة عامة، يلزم الحصول على قيم دقيقة للمشتقات عالية الترتيب من تأثيرات المدخلات، وهو أمر صعب التنفيذ من الناحية الفنية. في كثير من الأحيان، حتى التوليف النظري الدقيق للنظام الأمثل يتبين أنه مستحيل. ومع ذلك، فإن أساليب التصميم الأمثل تجعل من الممكن بناء أنظمة شبه مثالية، على الرغم من تبسيطها بدرجة أو بأخرى، ولكنها لا تزال تسمح بتحقيق قيم معايير الأمثلية المقبولة التي تكون قريبة من الحد الأقصى.
التحكم الأمثل في العمليات (محاضرة)
خطة المحاضرة
1. المفاهيم الأساسية لإيجاد الحد الأقصى للدالة
2. تصنيف طرق التحكم الأمثل
1. المفاهيم الأساسية لإيجاد الحد الأقصى للدالة
غالبًا ما تكون أي صياغة رياضية لمشكلة مثالية مساوية أو مكافئة لمشكلة إيجاد الحد الأقصى لدالة لمتغير واحد أو أكثر من المتغيرات المستقلة. لذلك، لحل هذه المشاكل المثلى، يمكن استخدام طرق مختلفة للبحث عن الحد الأقصى.
بشكل عام، يتم صياغة مشكلة التحسين على النحو التالي:
ابحث عن خارج الدالة R (x)، حيث XX
R (x) - تسمى الوظيفة أو الوظيفة الموضوعية أو معيار التحسين أو الوظيفة المحسنة
X متغير مستقل.
وكما هو معروف يمكن الحصول على الشروط اللازمة لوجود أقصى للدالة المستمرة R (x) من تحليل المشتق الأول. في هذه الحالة، يمكن أن تحتوي الدالة R (x) على قيم متطرفة لمثل هذه القيم للمتغير المستقل X، حيث يكون المشتق الأول يساوي 0. أي =0. بيانياً، إذا كان المشتق صفراً، فهذا يعني أن مماس المنحنى R(x) عند هذه النقطة يوازي الإحداثي السيني.

إن مساواة المشتقة = 0 شرط ضروري لوجود الحد الأقصى.
لكن مساواة المشتقة بالصفر لا تعني وجود حد أقصى عند هذه النقطة. ومن أجل التأكد أخيرًا من وجود حد متطرف بالفعل في هذه المرحلة، من الضروري إجراء بحث إضافي يتكون من الطرق التالية:
1. طريقة لمقارنة قيم الوظائف
تتم مقارنة قيمة الدالة R (x) عند النقطة القصوى "المشتبه بها" X K مع قيمتين متجاورتين للدالة R (x) عند النقطتين X K-ε و X K+ε، حيث ε صغيرة قيمة إيجابية. (الصورة 2)

إذا تبين أن القيمتين المحسوبتين لـ R (X K+ε) و R (X K-ε) أقل أو أكبر من R (X K)، فعند النقطة X K يوجد حد أقصى أو أدنى للدالة R (خ).
إذا كانت R (X K) لها قيمة متوسطة بين R (X K-ε) وR (X K+ε)، فإن الدالة R (x) ليس لها حد أقصى ولا حد أدنى.
2. طريقة مقارنة علامات المشتقات
دعونا نفكر مرة أخرى في الدالة R (X K) بالقرب من النقطة X K، أي. X K+ε وX K-ε. بهذه الطريقة تؤخذ إشارة المشتق في محيط النقطة X K بعين الاعتبار، وإذا كانت إشارات المشتق عند النقطتين X K-ε وX K + ε مختلفة، فإن هناك حدًا أقصى عند النقطة X K. وفي هذه الحالة يمكن معرفة نوع الحد الأقصى (min أو max) عن طريق تغيير إشارة المشتق عند الانتقال من النقطة X K-ε إلى النقطة X K+ε.
إذا تغيرت الإشارة من "+" إلى "-"، عند النقطة X K يوجد حد أقصى (الشكل 3 ب)، إذا كان على العكس من "-" إلى "+"، فهناك حد أدنى. (الشكل 3 أ)

3. طريقة لدراسة علامات المشتقات العليا.
تُستخدم هذه الطريقة في الحالات التي توجد فيها عند النقطة "المشتبه بها" في أقصى الحدود مشتقات ذات رتب أعلى، أي. الدالة R (X K) ليست مستمرة في حد ذاتها فحسب، بل لها أيضًا مشتقات مستمرة و.
وتتلخص الطريقة في ما يلي:
عند هذه النقطة اكس ك"المشتبه به" إلى أقصى الحدود، وهذا صحيح
![]() يتم حساب قيمة المشتق الثاني.
يتم حساب قيمة المشتق الثاني.
إذا في نفس الوقت ![]() ، عند النقطة X K هو الحد الأقصى،
، عند النقطة X K هو الحد الأقصى،
لو ![]() ، عند النقطة X K هو الحد الأدنى.
، عند النقطة X K هو الحد الأدنى.
عند حل مشاكل التحسين العملية، من الضروري العثور على ليس بعض القيمة الدنيا أو القصوى للدالة R (X K)، ولكن القيمة الأكبر أو الأصغر لهذه الوظيفة، والتي تسمى الحد الأقصى العالمي. (الشكل 4)
 |
في الحالة العامة، تتمثل مشكلة التحسين في إيجاد الحد الأقصى للدالة R (X)، في ظل وجود قيود معينة على معادلات النموذج الرياضي.
إذا كانت R (X) خطية، وتم تحديد منطقة الحلول الممكنة من خلال المساواة الخطية وعدم المساواة، فإن مشكلة العثور على الحدود القصوى للدالة تنتمي إلى فئة مشاكل البرمجة الخطية.
في كثير من الأحيان يتم تعريف المجموعة X على أنها نظام من الوظائف
![]()
إذن تبدو العبارة الرياضية لمسألة البرمجة الخطية كما يلي:
![]()
إذا لم تكن الدالة الهدف R (X) أو أي من القيود دالة خطية، فإن مهمة العثور على الحد الأقصى للدالة R (X) تنتمي إلى فئة مشاكل البرمجة غير الخطية.
إذا لم يتم فرض أي قيود على المتغيرات X، فإن مثل هذه المشكلة تسمى مشكلة متطرفة غير مشروطة.
مثال على مشكلة التحسين النموذجية
مشكلة حول صندوق الحجم الأقصى.
من هذا الفراغ، يجب قطع أربعة مربعات متساوية عند زواياها، وينبغي ثني الشكل الناتج (الشكل 5 ب) لتشكيل صندوق بدون غطاء علوي (الشكل 6.5 ج). في هذه الحالة، من الضروري اختيار حجم المربعات المقطوعة بحيث تحصل على صندوق بأقصى حجم.
باستخدام هذه المشكلة كمثال، يمكننا توضيح جميع عناصر تحديد مشاكل التحسين.

أرز. 5. مخطط لتصنيع صندوق من فراغ مستطيل بحجم ثابت
وظيفة التقييم في هذه المشكلة هي حجم الصندوق المصنع. المشكلة هي اختيار حجم المربعات المراد قطعها. في الواقع، إذا كان حجم المربعات المقطوعة صغيرًا جدًا، فسيتم الحصول على صندوق عريض منخفض الارتفاع، مما يعني أن الحجم سيكون صغيرًا. من ناحية أخرى، إذا كان حجم المربعات المقطوعة كبيرًا جدًا، فسيتم الحصول على صندوق ضيق بارتفاع كبير، مما يعني أن حجمه سيكون صغيرًا أيضًا.
في الوقت نفسه، يتأثر اختيار حجم المربعات المقطوعة بحدود حجم قطعة العمل الأصلية. في الواقع، إذا قمت بقطع المربعات مع جانب يساوي نصف جانب الشغل الأصلي، تصبح المهمة بلا معنى. كما لا يمكن أن يتجاوز جانب المربعات المقطوعة نصف جوانب قطعة العمل الأصلية، لأن هذا مستحيل لأسباب عملية. ويترتب على ذلك أن صياغة هذه المشكلة يجب أن تحتوي على بعض القيود.
الصيغة الرياضية لمشكلة الصندوق ذو الحجم الأقصى. لصياغة هذه المشكلة رياضيا، من الضروري أن نأخذ في الاعتبار بعض المعلمات التي تميز الأبعاد الهندسية للمربع. ولهذا الغرض، سنكمل الصياغة الموضوعية للمشكلة بالمعايير المناسبة. لهذا الغرض، سننظر في مربع فارغ مصنوع من بعض المواد المرنة، التي يبلغ طول ضلعها L (الشكل 6). من هذا الفراغ، يجب عليك قطع أربعة مربعات متساوية مع جانب في زواياها، وثني الشكل الناتج بحيث تحصل على صندوق بدون غطاء علوي. وتتمثل المهمة في تحديد حجم المربعات المقطوعة بحيث تكون النتيجة مربعًا بأقصى حجم.

أرز. 6. مخطط التصنيع من فراغ مستطيل يوضح أبعاده
لصياغة هذه المشكلة رياضيا، من الضروري تحديد متغيرات مشكلة التحسين المقابلة، وتعيين الدالة الهدف وتحديد القيود. كمتغير، يجب أن نأخذ طول جانب المربع المقطوع r، والذي في الحالة العامة، بناءً على صياغة ذات معنى للمشكلة، يأخذ قيمًا حقيقية مستمرة. الوظيفة الهدف هي حجم المربع الناتج. بما أن طول ضلع قاعدة الصندوق يساوي: L - 2r، وارتفاع الصندوق يساوي r، فيمكن إيجاد حجمه بالصيغة: V (r) = (L -2r) 2 ص. بناءً على الاعتبارات الفيزيائية، لا يمكن أن تكون قيم المتغير r سالبة وتتجاوز نصف حجم قطعة الشغل الأصلية L، أي. 0.5 لتر.
بالنسبة لقيم r = 0 و r = 0.5 L، يتم التعبير عن الحلول المقابلة لمشكلة الصندوق. في الواقع، في الحالة الأولى، تظل قطعة العمل دون تغيير، ولكن في الحالة الثانية يتم تقطيعها إلى 4 أجزاء متطابقة. وبما أن هذه الحلول لها تفسير مادي، فإن مشكلة الصندوق، لسهولة صياغتها وتحليلها، يمكن اعتبارها تحسينًا مع قيود مثل المتباينات غير الصارمة.
ولغرض التوحيد، نشير إلى المتغير بـ x = r، وهو ما لا يؤثر على طبيعة مشكلة التحسين التي يتم حلها. بعد ذلك يمكن كتابة الصيغة الرياضية لمشكلة الصندوق ذو الحجم الأقصى بالشكل التالي:
![]() حيث (1)
حيث (1)
الوظيفة الموضوعية لهذه المشكلة غير خطية، لذا فإن مشكلة الحد الأقصى لحجم المربع تنتمي إلى فئة البرمجة غير الخطية أو مشاكل التحسين غير الخطية.
2. تصنيف طرق التحكم الأمثل
يتكون تحسين العملية من إيجاد الأمثل للوظيفة قيد النظر أو الظروف المثلى لتنفيذ هذه العملية.
لتقييم الأمثل، أولا وقبل كل شيء، من الضروري تحديد معيار التحسين. عادة، يتم تحديد معيار التحسين من شروط محددة. يمكن أن يكون هذا معيارًا تكنولوجيًا (على سبيل المثال، محتوى النحاس في خبث التفريغ) أو معيارًا اقتصاديًا (الحد الأدنى لتكلفة المنتج عند إنتاجية عمل معينة)، وما إلى ذلك. واستنادًا إلى معيار التحسين المحدد، يتم تجميع وظيفة موضوعية تمثل اعتماد معيار التحسين على المعلمات التي تؤثر على قيمته. تكمن مشكلة التحسين في إيجاد الحد الأقصى للوظيفة الهدف. اعتمادا على طبيعة النماذج الرياضية قيد النظر، يتم اعتماد أساليب التحسين الرياضي المختلفة.
الصيغة العامة لمشكلة التحسين هي كما يلي:
1. حدد معيارًا
2. يتم تجميع المعادلة النموذجية
3. يتم فرض نظام التقييد
4. الحل
النموذج - خطي أو غير خطي
قيود
اعتمادًا على هيكل النموذج، يتم استخدام طرق التحسين المختلفة. وتشمل هذه:
1. طرق التحسين التحليلي (البحث التحليلي عن أقصى الحدود، طريقة مضاعف لاغرانج، الطرق التفاضلية)
2. البرمجة الرياضية (البرمجة الخطية، البرمجة الديناميكية)
3. طرق التدرج.
4. الأساليب الإحصائية (تحليل الانحدار)
البرمجة الخطية. في مسائل البرمجة الخطية، يتم تقديم معيار الأمثلية على النحو التالي:
|
حيث يتم إعطاء معاملات ثابتة؛ متغيرات المهمة |
المعادلات النموذجية هي معادلات خطية (متعددة الحدود) من النموذج ![]() التي تخضع لقيود في شكل المساواة أو عدم المساواة، أي.
التي تخضع لقيود في شكل المساواة أو عدم المساواة، أي.  (2)
(2)
في مسائل البرمجة الخطية يفترض عادة أن جميع المتغيرات المستقلة X j غير سلبية، أي.
الحل الأمثل لمشكلة البرمجة الخطية هو مجموعة من القيم غير السالبة للمتغيرات المستقلة
والتي تستوفي الشروط (2) وتوفر، اعتمادًا على صياغة المشكلة، القيمة القصوى أو الدنيا للمعيار.
التفسير الهندسي هو: ![]() - المعيار في وجود قيود على المتغيرين X 1 و X 2 من نوع التساويات والمتباينات
- المعيار في وجود قيود على المتغيرين X 1 و X 2 من نوع التساويات والمتباينات

R لها قيمة ثابتة على طول الخط l. الحل الأمثل سيكون عند النقطة S، لأنه في هذه المرحلة سيكون المعيار هو الحد الأقصى، إحدى طرق حل مشكلة تحسين البرمجة الخطية هي الطريقة البسيطة.
البرمجة غير الخطية.
الصيغة الرياضية لمسألة البرمجة غير الخطية هي كما يلي: أوجد الحد الأقصى للدالة الهدف ![]() ، والتي لها شكل اللاخطية.
، والتي لها شكل اللاخطية.
يتم فرض قيود مختلفة مثل المساواة أو عدم المساواة على المتغيرات المستقلة ![]()
حاليًا، يتم استخدام عدد كبير جدًا من الأساليب لحل مشكلات البرمجة غير الخطية.
وتشمل هذه ما يلي: 1) طرق التدرج (طريقة التدرج، طريقة الهبوط الأكثر انحدارًا، طريقة الصورة، طريقة روزنبروك، وما إلى ذلك)
2) الطرق الخالية من التدرج (طريقة غاوس سايدل، طريقة المسح).
طرق تحسين التدرج
وتنتمي هذه الطرق إلى الطرق العددية لنوع البحث. جوهر هذه الطرق هو تحديد قيم المتغيرات المستقلة التي تعطي أكبر (أصغر) تغيير في الدالة الهدف. يتم تحقيق ذلك عادةً من خلال التحرك على طول متعامد متدرج إلى سطح الكفاف عند نقطة معينة.
دعونا نفكر في طريقة التدرج. تستخدم هذه الطريقة تدرجًا للوظيفة الهدف. في طريقة التدرج، يتم اتخاذ الخطوات في اتجاه أسرع انخفاض في وظيفة الهدف.

أرز. 8. إيجاد الحد الأدنى باستخدام طريقة التدرج
يتم البحث عن الأمثل على مرحلتين:
المرحلة الأولى: - إيجاد قيم المشتقات الجزئية لجميع المتغيرات المستقلة التي تحدد اتجاه الانحدار عند النقطة المعنية.
المرحلة الثانية: - يتم اتخاذ الخطوة في الاتجاه المعاكس لاتجاه الانحدار أي: في اتجاه أسرع انخفاض في وظيفة الهدف.
يمكن كتابة خوارزمية طريقة التدرج على النحو التالي:
 (3)
(3)
طبيعة الحركة إلى المستوى الأمثل بطريقة الهبوط الأكثر انحدارًا هي كما يلي (الشكل 6.9)، بعد العثور على تدرج الدالة الأمثل عند النقطة الأولية وبالتالي يتم تحديد اتجاه أسرع انخفاض لها عند النقطة المحددة، يتم اتخاذ خطوة النسب في هذا الاتجاه. إذا انخفضت قيمة الدالة نتيجة هذه الخطوة، يتم اتخاذ خطوة أخرى في نفس الاتجاه، وهكذا حتى يتم العثور على الحد الأدنى في هذا الاتجاه، وبعد ذلك يتم حساب التدرج مرة أخرى واتجاه جديد للأسرع يتم تحديد انخفاض وظيفة الهدف.

طرق خالية من التدرج للبحث عن أقصى الحدود. هذه الأساليب، على عكس أساليب التدرج، تستخدم في عملية البحث المعلومات التي تم الحصول عليها ليس من تحليل المشتقات، ولكن من التقييم المقارن لقيمة معيار الأمثلية نتيجة لتنفيذ الخطوة التالية.
تتضمن الطرق الخالية من التدرج للبحث عن أقصى ما يلي:
1. طريقة النسبة الذهبية
2. الطريقة باستخدام أرقام الفيبونيوم
3. طريقة غاوس سايدل (طريقة الحصول على تغيير في متغير)
4. طريقة المسح، الخ.
بشكل عام، يتكون النظام الآلي من كائن تحكم ومجموعة من الأجهزة التي توفر التحكم في هذا الكائن. كقاعدة عامة، تتضمن هذه المجموعة من الأجهزة أجهزة القياس، وأجهزة التضخيم والتحويل، بالإضافة إلى المحركات. إذا قمنا بدمج هذه الأجهزة في رابط واحد (جهاز التحكم)، فإن المخطط التفصيلي للنظام يبدو كما يلي:
في النظام الآلي، يتم توفير معلومات حول حالة كائن التحكم إلى مدخلات جهاز التحكم من خلال جهاز قياس. تسمى هذه الأنظمة أنظمة التغذية الراجعة أو الأنظمة المغلقة. يشير غياب هذه المعلومات في خوارزمية التحكم إلى أن النظام مفتوح. سنصف حالة كائن التحكم في أي وقت  المتغيرات
المتغيرات  والتي تسمى إحداثيات النظام أو متغيرات الحالة. من الملائم اعتبارها إحداثيات
والتي تسمى إحداثيات النظام أو متغيرات الحالة. من الملائم اعتبارها إحداثيات  - ناقل الحالة الأبعاد.
- ناقل الحالة الأبعاد.
يوفر جهاز القياس معلومات حول حالة الكائن. إذا كان يعتمد على قياس المتجهات  يمكن العثور على قيم جميع الإحداثيات
يمكن العثور على قيم جميع الإحداثيات  ناقلات الدولة
ناقلات الدولة  ، يقال أن النظام يمكن ملاحظته بالكامل.
، يقال أن النظام يمكن ملاحظته بالكامل.
يقوم جهاز التحكم بإنشاء إجراء تحكم  . يمكن أن يكون هناك العديد من إجراءات التحكم هذه، فهي تتشكل
. يمكن أن يكون هناك العديد من إجراءات التحكم هذه، فهي تتشكل  - ناقل التحكم في الأبعاد.
- ناقل التحكم في الأبعاد.
يتلقى إدخال جهاز التحكم إدخالاً مرجعيًا  . يحمل إجراء الإدخال هذا معلومات حول الحالة التي يجب أن تكون عليها الكائن. قد يتعرض كائن التحكم لتأثير مزعج
. يحمل إجراء الإدخال هذا معلومات حول الحالة التي يجب أن تكون عليها الكائن. قد يتعرض كائن التحكم لتأثير مزعج  وهو ما يمثل حملاً أو اضطرابًا. عادةً ما يتم قياس إحداثيات كائن ما مع وجود بعض الأخطاء
وهو ما يمثل حملاً أو اضطرابًا. عادةً ما يتم قياس إحداثيات كائن ما مع وجود بعض الأخطاء  ، وهي عشوائية أيضًا.
، وهي عشوائية أيضًا.
مهمة جهاز التحكم هي تطوير إجراء التحكم هذا  بحيث تكون جودة عمل النظام الآلي ككل هي الأفضل إلى حد ما.
بحيث تكون جودة عمل النظام الآلي ككل هي الأفضل إلى حد ما.
سننظر في كائنات التحكم التي يمكن التحكم فيها. أي أنه يمكن تغيير ناقل الحالة كما هو مطلوب عن طريق تغيير ناقل التحكم بالمقابل. سنفترض أن الكائن يمكن ملاحظته بالكامل.
على سبيل المثال، يتميز موقع الطائرة بستة إحداثيات حالة. هذا  - إحداثيات مركز الكتلة،
- إحداثيات مركز الكتلة،  - زوايا أويلر، والتي تحدد اتجاه الطائرة بالنسبة لمركز الكتلة. يمكن تغيير وضع الطائرة باستخدام المصاعد، والتوجه، والجنيح، وتوجيه الدفع. وبالتالي يتم تعريف ناقل التحكم على النحو التالي:
- زوايا أويلر، والتي تحدد اتجاه الطائرة بالنسبة لمركز الكتلة. يمكن تغيير وضع الطائرة باستخدام المصاعد، والتوجه، والجنيح، وتوجيه الدفع. وبالتالي يتم تعريف ناقل التحكم على النحو التالي:
 - زاوية انحراف المصعد
- زاوية انحراف المصعد
 - حسنًا
- حسنًا
 - الجنيح
- الجنيح
 - شعبية
- شعبية
ناقلات الدولة  وفي هذه الحالة يتم تعريفه على النحو التالي:
وفي هذه الحالة يتم تعريفه على النحو التالي:
يمكنك طرح مشكلة اختيار عنصر تحكم يتم من خلاله نقل الطائرة من حالة أولية معينة  إلى حالة نهائية معينة
إلى حالة نهائية معينة  مع الحد الأدنى من استهلاك الوقود أو في أقل وقت ممكن.
مع الحد الأدنى من استهلاك الوقود أو في أقل وقت ممكن.
ينشأ تعقيد إضافي في حل المشكلات الفنية بسبب حقيقة أنه، كقاعدة عامة، يتم فرض قيود مختلفة على إجراء التحكم وعلى إحداثيات الحالة لكائن التحكم.
هناك قيود على أي زاوية للمصاعد، والانعراج، والجنيحات:



 - الجر نفسه محدود.
- الجر نفسه محدود.
تخضع إحداثيات الحالة لكائن التحكم ومشتقاتها أيضًا لقيود مرتبطة بالأحمال الزائدة المسموح بها.
سننظر في كائنات التحكم الموصوفة بالمعادلة التفاضلية:

 (1)
(1)
أو في شكل ناقل:

 -
- -ناقل الأبعاد لحالة الكائن
-ناقل الأبعاد لحالة الكائن
 -
- -ناقل الأبعاد لإجراءات التحكم
-ناقل الأبعاد لإجراءات التحكم
 - دالة الجانب الأيمن من المعادلة (1)
- دالة الجانب الأيمن من المعادلة (1)
إلى ناقل التحكم  تم فرض قيود، وسوف نفترض أن قيمها تنتمي إلى بعض المناطق المغلقة
تم فرض قيود، وسوف نفترض أن قيمها تنتمي إلى بعض المناطق المغلقة  بعض
بعض  -مساحة الأبعاد. وهذا يعني أن الوظيفة التنفيذية
-مساحة الأبعاد. وهذا يعني أن الوظيفة التنفيذية  ينتمي إلى المنطقة في أي وقت
ينتمي إلى المنطقة في أي وقت  (
( ).
).
على سبيل المثال، إذا كانت إحداثيات دالة التحكم تلبي المتباينات:


ثم المنطقة  يكون
يكون  -مكعب قياس.
-مكعب قياس.
دعونا نسمي أي دالة متصلة متعددة التعريف بأنها تحكم مقبول  ، والتي قيمها في كل لحظة من الزمن
، والتي قيمها في كل لحظة من الزمن  ينتمي إلى المنطقة
ينتمي إلى المنطقة  والتي قد يكون لها انقطاعات من النوع الأول. لقد اتضح أنه حتى في بعض مشاكل التحكم الأمثل، يمكن الحصول على الحل في فئة التحكم المستمر الجزئي. لاختيار السيطرة
والتي قد يكون لها انقطاعات من النوع الأول. لقد اتضح أنه حتى في بعض مشاكل التحكم الأمثل، يمكن الحصول على الحل في فئة التحكم المستمر الجزئي. لاختيار السيطرة  كدالة للوقت والحالة الأولية للنظام
كدالة للوقت والحالة الأولية للنظام  ، والتي تحدد بشكل فريد حركة كائن التحكم، يشترط أن يحقق نظام المعادلات (1) شروط نظرية الوجود وتفرد الحل في المنطقة
، والتي تحدد بشكل فريد حركة كائن التحكم، يشترط أن يحقق نظام المعادلات (1) شروط نظرية الوجود وتفرد الحل في المنطقة  . تحتوي هذه المنطقة على المسارات المحتملة لحركة الجسم ووظائف التحكم المحتملة.
. تحتوي هذه المنطقة على المسارات المحتملة لحركة الجسم ووظائف التحكم المحتملة.  . إذا كان مجال تباين المتغيرات محدبًا، فإنه يكفي لوجود الحل وتفرده أن تكون الدالة
. إذا كان مجال تباين المتغيرات محدبًا، فإنه يكفي لوجود الحل وتفرده أن تكون الدالة 
 . كانت مستمرة في جميع الحجج ولها مشتقات جزئية مستمرة بالنسبة للمتغيرات
. كانت مستمرة في جميع الحجج ولها مشتقات جزئية مستمرة بالنسبة للمتغيرات 
 .
.
كمعيار يميز جودة تشغيل النظام، يتم تحديد وظيفة النموذج:
 (2)
(2)
كوظيفة  سنفترض أنها مستمرة في جميع حججها ولها مشتقات جزئية متصلة فيما يتعلق
سنفترض أنها مستمرة في جميع حججها ولها مشتقات جزئية متصلة فيما يتعلق 
 .
.
تعريف وضرورة بناء أنظمة التحكم الآلي الأمثل
عادة ما يتم تصميم أنظمة التحكم الآلي بناءً على المتطلبات لضمان مؤشرات جودة معينة. في كثير من الحالات، يتم تحقيق الزيادة اللازمة في الدقة الديناميكية وتحسين العمليات العابرة لأنظمة التحكم الآلي بمساعدة الأجهزة التصحيحية.
يتم توفير فرص واسعة بشكل خاص لتحسين مؤشرات الجودة من خلال إدخال قنوات تعويض الحلقة المفتوحة والوصلات التفاضلية في ACS، والتي يتم تصنيعها من حالة أو أخرى من ثبات الخطأ فيما يتعلق بالتأثيرات الرئيسية أو المزعجة. ومع ذلك، فإن تأثير أجهزة التصحيح وقنوات التعويض المفتوحة والوصلات التفاضلية المكافئة على مؤشرات جودة ACS يعتمد على مستوى محدودية الإشارة بواسطة العناصر غير الخطية للنظام. تقتصر إشارات الخرج الخاصة بأجهزة التفريق، والتي عادة ما تكون قصيرة المدة وكبيرة السعة، على عناصر النظام ولا تؤدي إلى تحسين مؤشرات جودة النظام، ولا سيما سرعته. يتم الحصول على أفضل النتائج في حل مشكلة زيادة مؤشرات الجودة لنظام التحكم الآلي في وجود قيود الإشارة من خلال ما يسمى بالتحكم الأمثل.
تمت صياغة مشكلة تجميع الأنظمة المثالية بشكل صارم مؤخرًا نسبيًا، عندما تم تحديد مفهوم معيار الأمثلية. اعتمادًا على هدف التحكم، يمكن اختيار المؤشرات الفنية أو الاقتصادية المختلفة للعملية الخاضعة للرقابة كمعيار الأمثل. في الأنظمة المثالية، لا يتم ضمان مجرد زيادة طفيفة في واحد أو آخر من مؤشرات الجودة التقنية والاقتصادية، ولكن تحقيق الحد الأدنى أو الأقصى لقيمته الممكنة.
إذا كان معيار الأمثلية يعبر عن الخسائر الفنية والاقتصادية (أخطاء النظام، وقت عملية الانتقال، استهلاك الطاقة، الأموال، التكلفة، وما إلى ذلك)، فإن التحكم الأمثل سيكون هو الذي يوفر الحد الأدنى من معيار الأمثلية. إذا كان يعبر عن الربحية (الكفاءة، والإنتاجية، والربح، ومدى الصواريخ، وما إلى ذلك)، فإن التحكم الأمثل يجب أن يوفر الحد الأقصى من معيار الأمثلية.
مشكلة تحديد نظام التحكم الآلي الأمثل، ولا سيما تجميع المعلمات المثلى للنظام عند استلام السيد عند مدخلاته
تم تناول التأثير والتداخل، وهما إشارات عشوائية ثابتة، في الفصل. 7. دعونا نتذكر أنه في هذه الحالة، يتم أخذ جذر متوسط مربع الخطأ (RMS) كمعيار الأمثل. إن شروط زيادة دقة إعادة إنتاج الإشارة المفيدة (تحديد التأثير) وقمع التداخل متناقضة، وبالتالي تنشأ مهمة اختيار معلمات النظام (المثلى) التي يأخذ فيها الانحراف المعياري أصغر قيمة.
يعد تجميع النظام الأمثل باستخدام معيار مربع الأمثلية مشكلة خاصة. تعتمد الطرق العامة لتجميع الأنظمة المثالية على حساب التفاضل والتكامل للتغيرات. ومع ذلك، فإن الأساليب الكلاسيكية لحساب التفاضل والتكامل لحل المشكلات العملية الحديثة التي تتطلب مراعاة القيود، في كثير من الحالات، تكون غير مناسبة. إن أكثر الطرق ملائمة لتجميع أنظمة التحكم الآلي المثالية هي طريقة البرمجة الديناميكية لبيلمان ومبدأ بونترياجين الأقصى.
وبالتالي، إلى جانب مشكلة تحسين مؤشرات الجودة المختلفة لأنظمة التحكم الآلي، تنشأ مشكلة بناء أنظمة مثالية يتم فيها تحقيق القيمة القصوى لمؤشر أو آخر من مؤشرات الجودة التقنية والاقتصادية.
يساعد تطوير وتنفيذ أنظمة التحكم الآلي الأمثل على زيادة كفاءة استخدام وحدات الإنتاج وزيادة إنتاجية العمل وتحسين جودة المنتج وتوفير الطاقة والوقود والمواد الخام وما إلى ذلك.
مفاهيم حول حالة الطور ومسار الطور لجسم ما
في التكنولوجيا، غالبًا ما تنشأ مهمة نقل كائن (عملية) خاضع للرقابة من حالة إلى أخرى. على سبيل المثال، عند تحديد الأهداف، من الضروري تدوير هوائي محطة الرادار من الموضع الأولي مع السمت الأولي إلى الموضع المحدد مع السمت، وللقيام بذلك، يتم تغذية جهد التحكم إلى المحرك الكهربائي المتصل بالهوائي من خلال ناقل الحركة. في كل لحظة من الزمن، تتميز حالة الهوائي بالقيمة الحالية لزاوية الدوران والسرعة الزاوية، وتتغير هاتان الكميتان اعتمادًا على جهد التحكم و. وبالتالي، هناك ثلاث معلمات مترابطة و (الشكل 11.1).
تسمى الكميات التي تميز حالة الهوائي بإحداثيات الطور و- إجراء التحكم. عند تعيين هدف لرادار مثل محطة توجيه السلاح، تنشأ مهمة تدوير الهوائي في السمت والارتفاع. في هذه الحالة، سيكون لدينا إحداثيات الطور الأربعة للكائن وإجراءين للتحكم. بالنسبة للطائرة المحلقة، يمكننا أن نأخذ في الاعتبار إحداثيات الطور الستة (ثلاثة إحداثيات مكانية وثلاثة مكونات للسرعة) والعديد من إجراءات التحكم (دفع المحرك، والكميات التي تميز موضع الدفة

أرز. 11.1. رسم تخطيطي لكائن مع إجراء تحكم واحد وإحداثيات مرحلتين.

أرز. 11.2. رسم تخطيطي للكائن مع إجراءات التحكم وإحداثيات المرحلة.
![]()
أرز. 11.3. رسم تخطيطي لكائن مع صورة متجهة لإجراء التحكم وحالة الطور للكائن
الارتفاع والاتجاه والجنيحات). في الحالة العامة، في كل لحظة من الزمن، تتميز حالة الكائن بإحداثيات الطور، ويمكن تطبيق إجراءات التحكم على الكائن (الشكل 11.2).
ينبغي فهم نقل كائن (عملية) خاضع للرقابة من حالة إلى أخرى ليس فقط على أنه حركة ميكانيكية (على سبيل المثال، هوائي الرادار، الطائرة)، ولكن أيضًا على أنه التغيير المطلوب في الكميات الفيزيائية المختلفة: درجة الحرارة والضغط ورطوبة المقصورة التركيب الكيميائي لمادة خام معينة من خلال العملية التكنولوجية المناسبة الخاضعة للرقابة.
من الملائم اعتبار إجراءات التحكم بمثابة إحداثيات لمتجه معين يسمى ناقل إجراء التحكم. يمكن أيضًا اعتبار إحداثيات الطور (متغيرات الحالة) لكائن ما بمثابة إحداثيات متجه أو نقطة معينة في الفضاء ذي الأبعاد ذات الإحداثيات، وتسمى هذه النقطة بحالة الطور (متجه الحالة) للكائن، والفضاء ذو الأبعاد تسمى حالات الطور التي يتم تصويرها كنقاط بمساحة الطور (مساحة الحالة) للكائن قيد النظر. عند استخدام الصور المتجهة، يمكن تصوير الكائن المتحكم فيه كما هو موضح في الشكل. 11.3، حيث و هو ناقل إجراء التحكم ويمثل نقطة في مساحة الطور التي تميز حالة الطور للكائن. تحت تأثير إجراء التحكم، تتحرك نقطة الطور، واصفًا خطًا معينًا في مساحة الطور، يسمى مسار الطور لحركة الكائن المدروسة.
التحكم الأمثل
التحكم الأمثلهي مهمة تصميم نظام يوفر، لكائن أو عملية تحكم معينة، قانون تحكم أو تسلسل تحكم من التأثيرات التي تضمن الحد الأقصى أو الأدنى لمجموعة معينة من معايير جودة النظام.
لحل مشكلة التحكم الأمثل، يتم إنشاء نموذج رياضي للكائن أو العملية الخاضعة للتحكم، ويصف سلوكه بمرور الوقت تحت تأثير إجراءات التحكم وحالته الحالية. يتضمن النموذج الرياضي لمشكلة التحكم الأمثل ما يلي: صياغة هدف التحكم، معبرًا عنه من خلال معيار جودة التحكم؛ تحديد المعادلات التفاضلية أو التفاضلية التي تصف الطرق الممكنة لحركة كائن التحكم؛ تحديد القيود على الموارد المستخدمة في شكل معادلات أو متباينات.
الطرق الأكثر استخدامًا في تصميم أنظمة التحكم هي حساب التفاضل والتكامل للتغيرات ومبدأ بونترياجين الأقصى وبرمجة بيلمان الديناميكية.
في بعض الأحيان (على سبيل المثال، عند إدارة الأشياء المعقدة، مثل الفرن العالي في علم المعادن أو عند تحليل المعلومات الاقتصادية)، تحتوي البيانات الأولية والمعرفة حول الكائن الخاضع للرقابة عند تحديد مشكلة التحكم الأمثل على معلومات غير مؤكدة أو غامضة لا يمكن معالجتها بالطرق التقليدية الأساليب الكمية. في مثل هذه الحالات، يمكنك استخدام خوارزميات التحكم الأمثل بناءً على النظرية الرياضية للمجموعات الغامضة (التحكم الضبابي). يتم تحويل المفاهيم والمعرفة المستخدمة إلى شكل غامض، ويتم تحديد القواعد الغامضة لاشتقاق القرارات، ومن ثم يتم تحويل القرارات الغامضة مرة أخرى إلى متغيرات التحكم المادية.
مشكلة التحكم الأمثل
دعونا صياغة مشكلة التحكم الأمثل:
هنا ناقل الحالة - التحكم - اللحظات الأولية والأخيرة من الزمن.
تتمثل مشكلة التحكم الأمثل في العثور على وظائف الحالة والتحكم للوقت الذي يقلل من الوظيفة.
حساب التفاضل والتكامل من الاختلافات
دعونا نعتبر مشكلة التحكم الأمثل هذه بمثابة مشكلة لاغرانج في حساب التفاضل والتكامل للتغيرات. لإيجاد الشروط اللازمة لحد أقصى، نطبق نظرية أويلر-لاجرانج. دالة لاغرانج لها الشكل: حيث الشروط الحدودية. لاغرانج له الشكل: ، حيث، ، هي نواقل ذات أبعاد n لمضاعفات لاغرانج.
الشروط اللازمة للأقصى، وفقا لهذه النظرية، لها الشكل:
تشكل الشروط الضرورية (3-5) الأساس لتحديد المسارات المثلى. بعد كتابة هذه المعادلات، حصلنا على مسألة حدودية من نقطتين، حيث يتم تحديد جزء من الشروط الحدودية في اللحظة الأولى من الزمن، والباقي في اللحظة الأخيرة. وتناقش طرق حل مثل هذه المشاكل بالتفصيل في الكتاب.
مبدأ بونترياجين الأقصى
تنشأ الحاجة إلى مبدأ Pontryagin الأقصى في الحالة التي لا يكون من الممكن فيها تلبية الشرط الضروري (3) في أي مكان في النطاق المسموح به لمتغير التحكم.
وفي هذه الحالة يستبدل الشرط (3) بالشرط (6):
(6)في هذه الحالة، وفقًا لمبدأ بونترياجين الأقصى، فإن قيمة التحكم الأمثل تساوي قيمة التحكم عند أحد طرفي النطاق المسموح به. تتم كتابة معادلات بونترياجين باستخدام دالة هاميلتون H، التي تحددها العلاقة. ويترتب على المعادلات أن دالة هاملتون H مرتبطة بدالة لاغرانج L كما يلي: . باستبدال L من المعادلة الأخيرة في المعادلات (3-5) نحصل على الشروط اللازمة التي يتم التعبير عنها من خلال دالة هاميلتون:
تسمى الشروط الضرورية المكتوبة بهذا النموذج معادلات بونترياجين. تمت مناقشة مبدأ بونترياجين الأقصى بمزيد من التفصيل في الكتاب.
أين يتم استخدامه؟
مبدأ الحد الأقصى مهم بشكل خاص في أنظمة التحكم ذات السرعة القصوى والحد الأدنى من استهلاك الطاقة، حيث يتم استخدام عناصر التحكم من نوع التتابع التي تأخذ قيمًا متطرفة وليست متوسطة ضمن فترة التحكم المسموح بها.
قصة
لتطوير نظرية التحكم الأمثل L.S. بونترياجين ومعاونيه ف. بولتيانسكي، ر.ف. جامكريليدز وإي إف. حصل ميششينكو على جائزة لينين عام 1962.
طريقة البرمجة الديناميكية
تعتمد طريقة البرمجة الديناميكية على مبدأ بيلمان للمثالية والذي يتم صياغته على النحو التالي: تتميز استراتيجية التحكم الأمثل بخاصية أنه مهما كانت الحالة الأولية والتحكم في بداية العملية، فإن الضوابط اللاحقة يجب أن تشكل استراتيجية تحكم مثالية مقارنة بالحالة الأولية والتحكم في بداية العملية. الحالة التي تم الحصول عليها بعد المرحلة الأولى من العملية. تم وصف طريقة البرمجة الديناميكية بمزيد من التفصيل في الكتاب
ملحوظات
الأدب
- راسترجين إل. المبادئ الحديثة لإدارة الأشياء المعقدة. - م: سوف. راديو، 1980. - 232 ص، بنك البحرين والكويت 32.815، شرطة. 12000 نسخة
- ألكسيف في إم، تيخوميروف في إم. ، فومين إس. التحكم الأمثل. - م: ناوكا، 1979، UDC 519.6، - 223 صفحة، شرطة. 24000 نسخة
أنظر أيضا
مؤسسة ويكيميديا. 2010.
تعرف على معنى "التحكم الأمثل" في القواميس الأخرى:
التحكم الأمثل- التحكم في OU الذي يوفر القيمة الأكثر ملاءمة لمعيار أمثل معين (OC)، والذي يميز فعالية التحكم في ظل قيود معينة. مختلفة فنية أو اقتصادية... ... كتاب مرجعي للقاموس لمصطلحات التوثيق المعياري والتقني
التحكم الأمثل- الإدارة، والغرض منها هو ضمان القيمة القصوى لمؤشر جودة الإدارة. [مجموعة من المصطلحات الموصى بها. العدد 107. نظرية الإدارة. أكاديمية العلوم في اتحاد الجمهوريات الاشتراكية السوفياتية. لجنة المصطلحات العلمية والتقنية. 1984]…… دليل المترجم الفني
التحكم الأمثل- 1. المفهوم الأساسي للنظرية الرياضية للعمليات المثلى (التي تنتمي إلى فرع الرياضيات الذي يحمل نفس الاسم: "O.u")؛ يعني اختيار معلمات التحكم التي من شأنها أن توفر الأفضل من وجهة ... ... القاموس الاقتصادي والرياضي
يسمح، في ظل ظروف معينة (غالبا ما تكون متناقضة)، بتحقيق الهدف بأفضل طريقة ممكنة، على سبيل المثال. في أقل وقت، وبأكبر قدر من التأثير الاقتصادي، وبأقصى قدر من الدقة... القاموس الموسوعي الكبير
الطائرات هي قسم من ديناميكيات الطيران مخصص لتطوير واستخدام أساليب التحسين لتحديد قوانين التحكم في حركة الطائرة ومساراتها التي توفر الحد الأقصى أو الأدنى للمعيار المحدد... ... موسوعة التكنولوجيا
فرع من فروع الرياضيات يدرس المسائل التباينية غير الكلاسيكية. الأشياء التي تتعامل معها التكنولوجيا عادة ما تكون مجهزة بـ "دفات"، وبمساعدتها يتحكم الشخص في حركته. رياضيا، يتم وصف سلوك مثل هذا الكائن ... ... الموسوعة السوفيتية الكبرى