Optimala automatiska styrsystem. Optimal processtyrning (Föreläsning) Uppdrag och mål för produktionssystemledning
För att designa ett optimalt automatiskt kontrollsystem krävs fullständig information om op-förstärkaren, störande och masterinfluenser samt initiala och slutliga tillstånd för op-ampen. Därefter måste du välja ett optimalitetskriterium. En av systemkvalitetsindikatorerna kan användas som ett sådant kriterium. Kraven på individuella kvalitetsindikatorer är dock vanligtvis motsägelsefulla (exempelvis ökad noggrannhet i systemet uppnås genom att minska stabilitetsmarginalen). Dessutom bör ett optimalt system ha minsta möjliga fel inte bara när en specifik kontrollåtgärd utförs, utan under hela systemets driftstid. Det bör också beaktas att lösningen på det optimala kontrollproblemet inte bara beror på systemets struktur utan också på parametrarna för dess beståndsdelar.
Att uppnå optimal funktion av ACS bestäms till stor del av hur kontroll utförs över tiden, vad programmet är eller kontrollalgoritm. I detta avseende, för att bedöma systemens optimalitet, används integrerade kriterier, beräknade som summan av värdena för systemkvalitetsparametern som är av intresse för designers under hela kontrollprocessen.
Beroende på det antagna optimalitetskriteriet övervägs följande typer av optimala system.
1. System, optimal för prestanda, som ger den minsta tiden för att överföra op-amp från ett tillstånd till ett annat. I det här fallet ser optimalitetskriteriet ut så här:
där / n och / k är ögonblicken för början och slutet av kontrollprocessen.
I sådana system är varaktigheten av kontrollprocessen minimal. Det enklaste exemplet är ett motorstyrsystem som ger den minsta tiden för acceleration till en given hastighet, med hänsyn till alla befintliga begränsningar.
2. System, optimalt sett till resursförbrukning, som garanterar minimikriteriet

Var Till- Proportionalitetskoefficient. U(t)- kontrollåtgärd.
Ett sådant motorstyrningssystem säkerställer till exempel minimal bränsleförbrukning under hela kontrollperioden.
3. System, optimalt när det gäller kontrollförluster(eller noggrannhet), som ger minimala kontrollfel baserat på kriteriet där e(f) är det dynamiska felet.

I princip kan problemet med att utforma ett optimalt automatiskt styrsystem lösas genom den enklaste metoden att räkna upp alla möjliga alternativ. Naturligtvis kräver denna metod mycket tid, men moderna datorer gör det möjligt att använda den i vissa fall. För att lösa optimeringsproblem har speciella metoder för variationskalkylen utvecklats (maximummetod, dynamisk programmeringsmetod etc.), som gör det möjligt att ta hänsyn till alla begränsningar hos verkliga system.
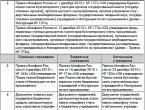
Som ett exempel, låt oss överväga vad den optimala varvtalskontrollen för en DC-elmotor bör vara om spänningen som tillförs den begränsas av gränsvärdet (/lr, och själva motorn kan representeras som en 2:a ordningens aperiodisk länk (Fig. 13,9, A).
Den maximala metoden låter dig beräkna förändringens lag u(d), säkerställa den minsta tiden för motoracceleration till rotationshastighet (Fig. 13.9, b). Styrprocessen för denna motor måste bestå av två intervall, i var och en av dem spänningen u(t) tar sitt högsta tillåtna värde (i intervallet 0 - /,: u(t)= +?/ ex, i intervallet /| - / 2: u(t)= -?/ pr)* För att säkerställa sådan styrning måste ett reläelement ingå i systemet.
Liksom konventionella system är optimala system öppna, slutna och kombinerade. Om den optimala styrningen som överför op-förstärkaren från initialtillståndet till sluttillståndet och är oberoende eller svagt beroende av störande influenser kan specificeras som en funktion av tiden U= (/(/), sedan bygger vi öppet system programkontroll (Fig. 13.10, A).
Det optimala programmet P, utformat för att uppnå gränsen för det accepterade optimalitetskriteriet, är inbäddat i PU-mjukvaruenheten. Enligt detta schema utförs förvaltning

Ris. 13.9.
A- med en gemensam kontrollanordning; b - med tvånivåkontroll
enhet
Ris. 13.10. Schema för optimala system: A- öppen; b- kombinerat
använda numeriskt styrda maskiner och enkla robotar, skjuta upp raketer i omloppsbana osv.
De mest avancerade, men också de mest komplexa, är kombinerade optimala system(Fig. 13.10, b). I sådana system utför en öppen slinga optimal styrning enligt ett givet program, och en stängd slinga, optimerad för att minimera fel, bearbetar avvikelsen av utgångsparametrarna. Med hjälp av störningsmätningsrepet /* blir systemet invariant med avseende på hela uppsättningen av drivande och störande influenser.
För att implementera ett sådant perfekt kontrollsystem är det nödvändigt att noggrant och snabbt mäta alla störande influenser. Denna möjlighet är dock inte alltid tillgänglig. Mycket oftare är endast genomsnittliga statistiska data kända om störande influenser. I många fall, särskilt i fjärrkontrollsystem, kommer till och med drivkraften in i systemet tillsammans med buller. Och eftersom interferensen i allmänhet är en slumpmässig process, är det endast möjligt att syntetisera statistiskt optimalt system. Ett sådant system kommer inte att vara optimalt för varje specifik implementering av kontrollprocessen, men den kommer i genomsnitt att vara den bästa för hela uppsättningen av dess implementeringar.
För statistiskt optimala system används medelvärde för probabilistiska uppskattningar som optimalitetskriterier. Till exempel, för ett spårningssystem optimerat för ett minimalt fel, används den matematiska förväntan av den kvadrerade avvikelsen av uteffekten från det specificerade värdet som ett statistiskt kriterium för optimalitet, dvs. variation:
Andra probabilistiska kriterier används också. Till exempel, i ett måldetekteringssystem, där endast närvaron eller frånvaron av ett mål är viktig, används sannolikheten för ett felaktigt beslut som ett optimalitetskriterium Rosh:
Var R sid ts är sannolikheten att missa målet; R LO- sannolikhet för falsk upptäckt.
I många fall visar sig de beräknade optimala automatiska styrsystemen vara praktiskt taget omöjliga att implementera på grund av deras komplexitet. Som regel är det nödvändigt att erhålla korrekta värden av högordningsderivat från ingående influenser, vilket är tekniskt mycket svårt att implementera. Ofta visar sig även en teoretisk exakt syntes av ett optimalt system vara omöjlig. Optimala designmetoder gör det dock möjligt att bygga kvasi-optimala system, även om de är förenklade i en eller annan grad, men ändå tillåter en att uppnå värden för de accepterade optimalitetskriterierna som är nära extrema.
Optimal processtyrning (föreläsning)
FÖRELÄSNINGSPLAN
1. Grundläggande begrepp för att hitta ytterpunkten för en funktion
2. Klassificering av optimala bekämpningsmetoder
1. Grundläggande begrepp för att hitta ytterpunkten för en funktion
Varje matematisk formulering av ett optimalt problem är ofta liktydigt med eller ekvivalent med problemet med att hitta extremumet för en funktion av en eller flera oberoende variabler. Därför, för att lösa sådana optimala problem, kan olika metoder för att söka efter ett extremum användas.
Generellt sett är optimeringsproblemet formulerat enligt följande:
Hitta extr av funktion R (x), där XX
R (x) – kallas den objektiva funktionen eller funktionen eller optimeringskriteriet eller optimerad funktion
X är en oberoende variabel.
Som är känt kan de nödvändiga villkoren för existensen av ett extremum av en kontinuerlig funktion R(x) erhållas från analysen av den första derivatan. I det här fallet kan funktionen R(x) ha extrema värden för sådana värden av den oberoende variabeln X, där den första derivatan är lika med 0, dvs. =0. Grafiskt, om derivatan är noll, betyder det att tangenten till kurvan R(x) vid denna punkt är parallell med abskissan.

Likheten för derivatan =0 är ett nödvändigt villkor för ett extremum.
Men derivatans likhet med noll betyder inte att det finns ett extremum vid denna punkt. För att slutligen försäkra sig om att det verkligen finns ett extremum vid denna tidpunkt är det nödvändigt att genomföra ytterligare forskning, som består av följande metoder:
1. Metod för att jämföra funktionsvärden
Värdet på funktionen R (x) vid den "misstänkta" extremumpunkten X K jämförs med två angränsande värden för funktionen R (x) vid punkterna X K-ε och X K+ε, där ε är en liten positivt värde. (Fig. 2)

Om båda de beräknade värdena för R (X K+ε) och R (X K-ε) visar sig vara mindre eller större än R (X K), så finns det vid punkten X K ett maximum eller minimum av funktionen R (x).
Om R (X K) har ett mellanvärde mellan R (X K-ε) och R (X K+ε), så har funktionen R (x) varken ett maximum eller ett minimum.
2. Metod för att jämföra tecknen för derivator
Låt oss återigen betrakta funktionen R (X K) i närheten av punkten X K, dvs. X K+ε och X K-ε. Med denna metod beaktas tecknet för derivatan i närheten av punkten X K. Om tecknen för derivatan i punkterna X K-ε och X K + ε är olika, så finns det ett extremum i punkten X K. I detta fall kan typen av extremum (min eller max) hittas genom att ändra tecknet för derivatan när man flyttar från punkt X K-ε till punkt X K+ε.
Om tecknet ändras från "+" till "-", så finns det vid punkt X K ett maximum (fig. 3b), om tvärtom från "-" till "+", så finns det ett minimum. (Fig. 3a)

3. En metod för att studera tecknen för högre derivator.
Denna metod används i de fall där det vid den "misstänkta" punkten vid extremumet finns derivator av högre ordning, d.v.s. funktionen R (X K) är inte bara kontinuerlig själv, utan har också kontinuerliga derivator och .
Metoden kokar ner till följande:
Vid punkten X K"misstänkt" till det yttersta, för vilket det är sant
![]() värdet av den andra derivatan beräknas.
värdet av den andra derivatan beräknas.
Om samtidigt ![]() , då vid punkt X K är maximum,
, då vid punkt X K är maximum,
Om ![]() , då är X K ett minimum.
, då är X K ett minimum.
När man löser praktiska optimeringsproblem är det nödvändigt att inte hitta något min- eller maxvärde för funktionen R (X K), utan det största eller minsta värdet för denna funktion, som kallas det globala extremumet. (Fig. 4)
 |
I det allmänna fallet består optimeringsproblemet i att hitta extremumet för funktionen R (X), i närvaro av vissa restriktioner för den matematiska modellens ekvationer.
Om R (X) är linjär och området för möjliga lösningar specificeras av linjära likheter och olikheter, så hör problemet med att hitta extrema för en funktion till klassen linjära programmeringsproblem.
Ofta definieras mängden X som ett system av funktioner
![]()
Sedan ser den matematiska satsen för det linjära programmeringsproblemet ut så här:
![]()
Om antingen målfunktionen R (X) eller någon av begränsningarna inte är en linjär funktion, så tillhör uppgiften att hitta extremumet för funktionen R (X) klassen av icke-linjära programmeringsproblem.
Om inga restriktioner läggs på variablerna X, så kallas ett sådant problem ett ovillkorligt extremumproblem.
Exempel på ett typiskt optimeringsproblem
Problem med en låda med maximal volym.
Från detta ämne ska fyra jämna rutor skäras ut i dess hörn, och den resulterande figuren (fig. 5 b) ska böjas så att den bildar en låda utan topplock (fig. 6.5 c). i det här fallet är det nödvändigt att välja storleken på de skurna rutorna så att du får en låda med maximal volym.
Med hjälp av detta problem som ett exempel kan vi illustrera alla delar av att ställa in optimeringsproblem.

Ris. 5. Schema för tillverkning av en låda från ett rektangulärt ämne av en fast storlek
Utvärderingsfunktionen i detta problem är volymen på den tillverkade lådan. Problemet är att välja storleken på de rutor som ska skäras ut. Faktum är att om storleken på de skurna kvadraterna är för liten, kommer en bred låda med låg höjd att erhållas, vilket betyder att volymen blir liten. Å andra sidan, om storleken på de skurna rutorna är för stor, kommer en smal låda med stor höjd att erhållas, vilket innebär att dess volym också blir liten.
Samtidigt påverkas valet av storleken på de skurna kvadraterna av begränsningen av storleken på det ursprungliga arbetsstycket. Faktum är att om du skär ut rutor med en sida som är lika med halva sidan av det ursprungliga arbetsstycket, blir uppgiften meningslös. Sidan på de skurna rutorna får inte heller överstiga hälften av sidorna av det ursprungliga arbetsstycket, eftersom detta är omöjligt av praktiska skäl. Av detta följer att formuleringen av detta problem måste innehålla vissa begränsningar.
Matematisk formulering av problemet med en låda med maximal volym. För att formulera detta problem matematiskt är det nödvändigt att ta hänsyn till några parametrar som kännetecknar lådans geometriska dimensioner. För detta ändamål kommer vi att komplettera den materiella formuleringen av problemet med lämpliga parametrar. För detta ändamål kommer vi att överväga ett fyrkantigt ämne av något flexibelt material, som har en sidolängd L (fig. 6). Från detta ämne ska du skära ut fyra jämna rutor med en sida i hörnen och böja den resulterande figuren så att du får en låda utan topplock. Uppgiften är att välja storleken på de utskurna rutorna så att resultatet blir en ruta med maximal volym.

Ris. 6. Tillverkningsdiagram från ett rektangulärt ämne som anger dess dimensioner
För att formulera detta problem matematiskt är det nödvändigt att bestämma variablerna för motsvarande optimeringsproblem, ställa in målfunktionen och specificera begränsningar. Som variabel bör vi ta längden på sidan av den skurna kvadraten r, som i det allmänna fallet, baserat på den meningsfulla formuleringen av problemet, tar kontinuerliga reella värden. Den objektiva funktionen är volymen av den resulterande rutan. Eftersom längden på sidan av lådans bas är lika med: L - 2r, och höjden på lådan är lika med r, hittas dess volym av formeln: V (r) = (L -2r) 2 r. Baserat på fysiska överväganden kan värdena för variabeln r inte vara negativa och överstiga hälften av storleken på det ursprungliga arbetsstycket L, dvs. 0,5 L.
För värden på r = 0 och r = 0,5 L uttrycks motsvarande lösningar på boxproblemet. I det första fallet förblir arbetsstycket oförändrat, men i det andra fallet skärs det i 4 identiska delar. Eftersom dessa lösningar har en fysisk tolkning kan boxproblemet, för att underlätta dess formulering och analys, betraktas som en optimering med begränsningar som icke-strikta ojämlikheter.
För enhetsändamål betecknar vi variabeln med x = r, vilket inte påverkar arten av optimeringsproblemet som löses. Sedan kan den matematiska formuleringen av problemet med en låda med maximal volym skrivas i följande form:
![]() där (1)
där (1)
Den objektiva funktionen för detta problem är olinjär, så boxproblemet med maximal storlek tillhör klassen av olinjär programmering eller olinjär optimeringsproblem.
2. Klassificering av optimala bekämpningsmetoder
Processoptimering består i att hitta optimum för den aktuella funktionen eller de optimala förutsättningarna för att genomföra denna process.
För att utvärdera det optimala är det först och främst nödvändigt att välja ett optimeringskriterium. Normalt väljs optimeringskriteriet från specifika villkor. Detta kan vara ett teknologiskt kriterium (till exempel Cu-halt i dumpad slagg) eller ett ekonomiskt kriterium (minimikostnad för en produkt vid en given arbetsproduktivitet) etc. Utifrån det valda optimeringskriteriet sammanställs en objektiv funktion, som representerar optimeringskriteriets beroende av de parametrar som påverkar dess värde. Optimeringsproblemet handlar om att hitta den yttersta delen av den objektiva funktionen. Beroende på arten av de matematiska modellerna som övervägs, används olika matematiska optimeringsmetoder.
Den allmänna formuleringen av optimeringsproblemet är som följer:
1. Välj ett kriterium
2. Modellekvationen sammanställs
3. Ett begränsningssystem införs
4. Lösning
modell - linjär eller olinjär
Restriktioner
Beroende på modellens struktur används olika optimeringsmetoder. Dessa inkluderar:
1. Analytiska optimeringsmetoder (analytisk sökning efter extremum, Lagrange multiplikatormetod, Variationsmetoder)
2. Matematisk programmering (linjär programmering, dynamisk programmering)
3. Gradientmetoder.
4. Statistiska metoder (Regressionsanalys)
Linjär programmering. I linjära programmeringsproblem presenteras optimalitetskriteriet som:
|
där ges konstanta koefficienter; Uppgiftsvariabler. |
Modellekvationerna är linjära ekvationer (polynom) av formen ![]() som är föremål för begränsningar i form av jämlikhet eller ojämlikhet, d.v.s.
som är föremål för begränsningar i form av jämlikhet eller ojämlikhet, d.v.s.  (2)
(2)
I linjära programmeringsproblem brukar man anta att alla oberoende variabler X j är icke-negativa, d.v.s.
Den optimala lösningen på ett linjärt programmeringsproblem är en sådan uppsättning icke-negativa värden av oberoende variabler
Som uppfyller villkor (2) och ger, beroende på problemformuleringen, kriteriets max- eller minvärde.
Den geometriska tolkningen är: ![]() - kriterium i närvaro av restriktioner för variablerna X 1 och X 2 av typen av likheter och ojämlikheter
- kriterium i närvaro av restriktioner för variablerna X 1 och X 2 av typen av likheter och ojämlikheter

R har ett konstant värde längs linjen l. Den optimala lösningen kommer att vara vid punkt S, eftersom vid denna tidpunkt kommer kriteriet att vara max. En av metoderna för att lösa optimeringsproblemet med linjär programmering är simplexmetoden.
Icke-linjär programmering.
Den matematiska formuleringen av det olinjära programmeringsproblemet är som följer: Hitta extremumet för objektivfunktionen ![]() , som har formen av olinjäritet.
, som har formen av olinjäritet.
Olika restriktioner som jämlikheter eller ojämlikheter läggs på oberoende variabler ![]()
För närvarande används ett ganska stort antal metoder för att lösa olinjära programmeringsproblem.
Dessa inkluderar: 1) Gradientmetoder (gradientmetod, brantaste nedstigningsmetod, bildmetod, Rosenbrock-metoden, etc.)
2) Gradientfria metoder (Gauss-Seidel-metoden, skanningsmetod).
Gradientoptimeringsmetoder
Dessa metoder tillhör de numeriska metoderna för söktypen. Kärnan i dessa metoder är att bestämma värdena för oberoende variabler som ger den största (minsta) förändringen i den objektiva funktionen. Detta uppnås vanligtvis genom att röra sig längs en gradient vinkelrät mot konturytan vid en given punkt.
Låt oss överväga gradientmetoden. Denna metod använder en gradient av objektivfunktionen. I gradientmetoden tas steg i riktning mot den snabbaste minskningen av objektivfunktionen.

Ris. 8. Hitta minimum med hjälp av gradientmetoden
Sökandet efter det optimala utförs i två steg:
Steg 1: - hitta värdena för partiella derivator för alla oberoende variabler som bestämmer gradientens riktning vid den aktuella punkten.
Steg 2: - ett steg tas i motsatt riktning mot gradientens riktning, d.v.s. i riktning mot den snabbaste minskningen av objektivfunktionen.
Gradientmetodalgoritmen kan skrivas på följande sätt:
 (3)
(3)
Arten av rörelsen till det optimala med den brantaste nedstigningsmetoden är som följer (fig. 6.9), efter att gradienten för den optimerade funktionen hittats vid den initiala punkten och därigenom riktningen för dess snabbaste minskning vid den specificerade punkten bestäms, ett nedstigningssteg tas i denna riktning. Om värdet på funktionen minskar som ett resultat av detta steg, tas ytterligare ett steg i samma riktning, och så vidare tills ett minimum hittas i denna riktning, varefter gradienten beräknas igen och en ny riktning för den snabbaste minskning av den objektiva funktionen bestäms.

Gradientfria metoder för att söka efter extremum. Dessa metoder, till skillnad från gradientmetoder, använder i sökprocessen information som inte erhålls från analysen av derivat, utan från en jämförande bedömning av värdet av optimalitetskriteriet som ett resultat av att utföra nästa steg.
Gradientfria metoder för att söka efter extremum inkluderar:
1. gyllene snittmetoden
2. metod som använder Fibonium-tal
3. Gaus-Seidel-metoden (metod för att få en förändring i en variabel)
4. skanningsmetod osv.
I allmänhet består ett automatiskt system av ett kontrollobjekt och en uppsättning enheter som ger kontroll över detta objekt. Som regel inkluderar denna uppsättning enheter mätanordningar, förstärknings- och omvandlingsanordningar, såväl som ställdon. Om vi kombinerar dessa enheter till en länk (kontrollenhet), ser blockschemat för systemet ut så här:
I ett automatiskt system tillförs information om styrobjektets tillstånd till styranordningens ingång via en mätanordning. Sådana system kallas för återkopplingssystem eller slutna system. Frånvaron av denna information i kontrollalgoritmen indikerar att systemet är öppet. Vi kommer att beskriva kontrollobjektets tillstånd när som helst  variabler
variabler  , som kallas systemkoordinater eller tillståndsvariabler. Det är bekvämt att betrakta dem som koordinater
, som kallas systemkoordinater eller tillståndsvariabler. Det är bekvämt att betrakta dem som koordinater  - dimensionell tillståndsvektor.
- dimensionell tillståndsvektor.
Mätanordningen ger information om objektets tillstånd. Om baserat på vektormätningen  värdena för alla koordinater kan hittas
värdena för alla koordinater kan hittas  tillståndsvektor
tillståndsvektor  , då sägs systemet vara helt observerbart.
, då sägs systemet vara helt observerbart.
Styranordningen genererar en styråtgärd  . Det kan finnas flera sådana kontrollåtgärder, de bildar
. Det kan finnas flera sådana kontrollåtgärder, de bildar  - dimensionell kontrollvektor.
- dimensionell kontrollvektor.
Styrenhetens ingång får en referensingång  . Denna inmatningsåtgärd innehåller information om hur objektets tillstånd ska vara. Kontrollobjektet kan utsättas för en störande påverkan
. Denna inmatningsåtgärd innehåller information om hur objektets tillstånd ska vara. Kontrollobjektet kan utsättas för en störande påverkan  , som representerar en belastning eller störning. Att mäta koordinaterna för ett objekt utförs vanligtvis med vissa fel
, som representerar en belastning eller störning. Att mäta koordinaterna för ett objekt utförs vanligtvis med vissa fel  , som också är slumpmässiga.
, som också är slumpmässiga.
Styranordningens uppgift är att utveckla en sådan styråtgärd  så att kvaliteten på det automatiska systemets funktion som helhet skulle vara den bästa i någon mening.
så att kvaliteten på det automatiska systemets funktion som helhet skulle vara den bästa i någon mening.
Vi kommer att överväga kontrollobjekt som är hanterbara. Det vill säga, tillståndsvektorn kan ändras efter behov genom att på motsvarande sätt ändra styrvektorn. Vi kommer att anta att objektet är helt observerbart.
Till exempel kännetecknas ett flygplans position av sex tillståndskoordinater. Detta  - koordinater för masscentrum,
- koordinater för masscentrum,  - Euler-vinklar, som bestämmer flygplanets orientering i förhållande till massans centrum. Flygplanets attityd kan ändras med hjälp av hissar, kurs, skevroder och dragkraftsvektoring. Sålunda definieras kontrollvektorn enligt följande:
- Euler-vinklar, som bestämmer flygplanets orientering i förhållande till massans centrum. Flygplanets attityd kan ändras med hjälp av hissar, kurs, skevroder och dragkraftsvektoring. Sålunda definieras kontrollvektorn enligt följande:
 - hissens avböjningsvinkel
- hissens avböjningsvinkel
 - ja
- ja
 - skevroder
- skevroder
 - dragkraft
- dragkraft
Tillståndsvektor  i detta fall definieras det enligt följande:
i detta fall definieras det enligt följande:
Du kan ställa till problemet med att välja en kontroll med hjälp av vilken flygplanet överförs från ett givet initialtillstånd  till ett givet sluttillstånd
till ett givet sluttillstånd  med minimal bränsleförbrukning eller på minimal tid.
med minimal bränsleförbrukning eller på minimal tid.
Ytterligare komplexitet vid lösning av tekniska problem uppstår på grund av att det i regel läggs olika begränsningar på kontrollåtgärden och på kontrollobjektets tillståndskoordinater.
Det finns restriktioner för alla vinklar på hissar, girar och skevroder:



 - själva dragkraften är begränsad.
- själva dragkraften är begränsad.
Tillståndskoordinaterna för kontrollobjektet och deras derivator är också föremål för restriktioner som är förknippade med tillåtna överbelastningar.
Vi kommer att överväga kontrollobjekt som beskrivs av differentialekvationen:

 (1)
(1)
Eller i vektorform:

 -
- -dimensionell vektor av objekttillstånd
-dimensionell vektor av objekttillstånd
 -
- -dimensionell vektor av kontrollåtgärder
-dimensionell vektor av kontrollåtgärder
 - funktion av höger sida av ekvation (1)
- funktion av höger sida av ekvation (1)
Till kontrollvektorn  en begränsning införs, kommer vi att anta att dess värden tillhör någon sluten region
en begränsning införs, kommer vi att anta att dess värden tillhör någon sluten region  några
några  -dimensionellt utrymme. Detta innebär att den verkställande funktionen
-dimensionellt utrymme. Detta innebär att den verkställande funktionen  tillhör regionen när som helst
tillhör regionen när som helst  (
( ).
).
Så, till exempel, om koordinaterna för kontrollfunktionen uppfyller ojämlikheterna:


sedan området  är
är  -uppmätt kub.
-uppmätt kub.
Låt oss kalla varje styckvis kontinuerlig funktion en tillåten kontroll  , vars värden vid varje tidpunkt
, vars värden vid varje tidpunkt  tillhör regionen
tillhör regionen  , och som kan ha diskontinuiteter av det första slaget. Det visar sig att även i vissa optimala styrproblem kan lösningen erhållas i klassen styckvis kontinuerlig styrning. För att välja kontroll
, och som kan ha diskontinuiteter av det första slaget. Det visar sig att även i vissa optimala styrproblem kan lösningen erhållas i klassen styckvis kontinuerlig styrning. För att välja kontroll  som en funktion av tiden och systemets initiala tillstånd
som en funktion av tiden och systemets initiala tillstånd  , som unikt bestämmer kontrollobjektets rörelse, krävs det att ekvationssystemet (1) uppfyller villkoren för satsen om existens och lösningens unikhet i området
, som unikt bestämmer kontrollobjektets rörelse, krävs det att ekvationssystemet (1) uppfyller villkoren för satsen om existens och lösningens unikhet i området  . Detta område innehåller möjliga banor för objektets rörelse och möjliga kontrollfunktioner.
. Detta område innehåller möjliga banor för objektets rörelse och möjliga kontrollfunktioner.  . Om variationsdomänen för variabler är konvex, så är det tillräckligt för existensen och unikheten av en lösning att funktionen
. Om variationsdomänen för variabler är konvex, så är det tillräckligt för existensen och unikheten av en lösning att funktionen 
 . var kontinuerliga i alla argument och hade kontinuerliga partiella derivator med avseende på variabler
. var kontinuerliga i alla argument och hade kontinuerliga partiella derivator med avseende på variabler 
 .
.
Som ett kriterium som kännetecknar kvaliteten på systemdriften väljs en funktion av formuläret:
 (2)
(2)
Som en funktion  vi kommer att anta att den är kontinuerlig i alla sina argument och har kontinuerliga partiella derivator med avseende på
vi kommer att anta att den är kontinuerlig i alla sina argument och har kontinuerliga partiella derivator med avseende på 
 .
.
Definition och nödvändighet av att bygga optimala automatiska styrsystem
Automatiska styrsystem utformas vanligtvis utifrån kraven för att säkerställa vissa kvalitetsindikatorer. I många fall uppnås den nödvändiga ökningen av dynamisk noggrannhet och förbättring av transienta processer för automatiska styrsystem med hjälp av korrigeringsanordningar.
Särskilt breda möjligheter för att förbättra kvalitetsindikatorer ges genom introduktionen i ACS av kompensationskanaler med öppen slinga och differentiella anslutningar, syntetiserade från ett eller annat tillstånd av felinvarians med avseende på master eller störande influenser. Effekten av korrigeringsanordningar, öppna kompensationskanaler och ekvivalenta differentialanslutningar på kvalitetsindikatorerna för ACS beror dock på nivån av signalbegränsning av olinjära element i systemet. Utsignalerna från differentierande anordningar, vanligtvis korta i varaktighet och betydande i amplitud, är begränsade till elementen i systemet och leder inte till en förbättring av systemets kvalitetsindikatorer, i synnerhet dess hastighet. De bästa resultaten för att lösa problemet med att öka kvalitetsindikatorerna för ett automatiskt styrsystem i närvaro av signalbegränsningar erhålls genom den så kallade optimala kontrollen.
Problemet med att syntetisera optimala system formulerades strikt relativt nyligen, när konceptet med ett optimalitetskriterium definierades. Beroende på kontrollmålet kan olika tekniska eller ekonomiska indikatorer för den kontrollerade processen väljas som ett optimalitetskriterium. I optimala system säkerställs inte bara en liten ökning av en eller annan teknisk och ekonomisk kvalitetsindikator, utan uppnår dess lägsta eller högsta möjliga värde.
Om optimalitetskriteriet uttrycker tekniska och ekonomiska förluster (systemfel, övergångsprocesstid, energiförbrukning, medel, kostnad, etc.), så kommer den optimala kontrollen att vara den som ger det lägsta optimalitetskriteriet. Om det uttrycker lönsamhet (effektivitet, produktivitet, vinst, missilområde, etc.), bör optimal kontroll ge det maximala optimalitetskriteriet.
Problemet med att bestämma det optimala automatiska styrsystemet, särskilt syntesen av optimala parametrar för systemet när en master tas emot vid dess ingång
påverkan och störningar, som är stationära slumpmässiga signaler, övervägdes i kap. 7. Låt oss komma ihåg att i detta fall tas rotmedelkvadratfelet (RMS) som optimalitetskriteriet. Förutsättningarna för att öka noggrannheten i reproduktionen av den användbara signalen (specificera inflytande) och undertrycka störningar är motsägelsefulla, och därför uppstår uppgiften att välja sådana (optimala) systemparametrar vid vilka standardavvikelsen tar det minsta värdet.
Syntes av ett optimalt system med användning av medelkvadratoptimitetskriteriet är ett särskilt problem. Allmänna metoder för att syntetisera optimala system är baserade på variationskalkylen. Men klassiska metoder för variationskalkyl för att lösa moderna praktiska problem som kräver att man tar hänsyn till begränsningar, visar sig i många fall vara olämpliga. De bekvämaste metoderna för att syntetisera optimala automatiska styrsystem är Bellmans dynamiska programmeringsmetod och Pontryagins maximiprincip.
Sålunda, tillsammans med problemet med att förbättra olika kvalitetsindikatorer för automatiska styrsystem, uppstår problemet med att konstruera optimala system där det extrema värdet av en eller annan teknisk och ekonomisk kvalitetsindikator uppnås.
Utvecklingen och implementeringen av optimala automatiska styrsystem hjälper till att öka effektiviteten i användningen av produktionsenheter, öka arbetsproduktiviteten, förbättra produktkvaliteten, spara energi, bränsle, råvaror etc.
Begrepp om ett objekts fastillstånd och fasbana
Inom tekniken uppstår ofta uppgiften att överföra ett kontrollerat objekt (process) från ett tillstånd till ett annat. Vid t.ex. utpekande av mål är det nödvändigt att vrida radarstationens antenn från utgångspositionen med den initiala azimuten till den specificerade positionen med azimuten. För att göra detta tillförs styrspänning till den elektriska motorn som är ansluten till antennen genom en växellåda. Vid varje tidpunkt kännetecknas antennens tillstånd av det aktuella värdet på rotationsvinkeln och vinkelhastigheten Dessa två storheter ändras beroende på styrspänningen och. Det finns alltså tre sammankopplade parametrar och (Fig. 11.1).
Storheterna som kännetecknar tillståndet hos antennen kallas faskoordinater, och - styrverkan. När ett mål utpekar en radar, såsom en pistolstyrningsstation, uppstår uppgiften att rotera antennen i azimut och höjd. I det här fallet kommer vi att ha fyra faskoordinater för objektet och två kontrollåtgärder. För ett flygande flygplan kan vi överväga sex faskoordinater (tre rumsliga koordinater och tre hastighetskomponenter) och flera kontrollåtgärder (motordragkraft, kvantiteter som kännetecknar rodrens position

Ris. 11.1. Diagram över ett objekt med en kontrollåtgärd och två faskoordinater.

Ris. 11.2. Diagram över objektet med kontrollåtgärder och faskoordinater.
![]()
Ris. 11.3. Diagram över ett objekt med en vektorbild av kontrollåtgärden och objektets fastillstånd
höjd och riktning, skevroder). I det allmänna fallet, vid varje tidpunkt, kännetecknas ett objekts tillstånd av faskoordinater, och kontrollåtgärder kan tillämpas på objektet (fig. 11.2).
Överföringen av ett kontrollerat objekt (process) från ett tillstånd till ett annat bör inte bara förstås som mekanisk rörelse (till exempel en radarantenn, flygplan), utan också som den nödvändiga förändringen i olika fysiska kvantiteter: temperatur, tryck, kabinens luftfuktighet , kemisk sammansättning av ett visst råmaterial med lämplig kontrollerad teknisk process.
Det är bekvämt att betrakta kontrollåtgärder som koordinaterna för en viss vektor som kallas kontrollåtgärdsvektorn. Faskoordinaterna (tillståndsvariablerna) för ett objekt kan också betraktas som koordinaterna för en viss vektor eller punkt i det dimensionella rummet med koordinater. Denna punkt kallas objektets fastillstånd (tillståndsvektor) och det -dimensionella rummet i vilka fastillstånd avbildas som punkter kallas fasrymd (tillståndsrymd) för föremålet i fråga. När du använder vektorbilder kan det kontrollerade objektet avbildas som visas i Fig. 11.3, där och är vektorn för kontrollåtgärden och representerar en punkt i fasrummet som kännetecknar objektets fastillstånd. Under påverkan av kontrollåtgärden rör sig faspunkten och beskriver en viss linje i fasrymden, kallad fasbanan för objektets övervägda rörelse.
Optimal kontroll
Optimal kontrollär uppgiften att utforma ett system som tillhandahåller, för ett givet kontrollobjekt eller -process, en kontrolllag eller en kontrollsekvens av påverkan som säkerställer maximalt eller minimum av en given uppsättning systemkvalitetskriterier.
För att lösa det optimala kontrollproblemet konstrueras en matematisk modell av det kontrollerade objektet eller processen, som beskriver dess beteende över tid under påverkan av kontrollåtgärder och dess eget nuvarande tillstånd. Den matematiska modellen för det optimala kontrollproblemet innefattar: formuleringen av kontrollmålet, uttryckt genom kontrollkvalitetskriteriet; bestämning av differential- eller differensekvationer som beskriver möjliga sätt att förflytta styrobjektet; fastställande av restriktioner för de resurser som används i form av ekvationer eller ojämlikheter.
De mest använda metoderna vid konstruktion av styrsystem är variationskalkyl, Pontryagins maximiprincip och Bellman dynamisk programmering.
Ibland (till exempel vid hantering av komplexa objekt, såsom en masugn inom metallurgi eller vid analys av ekonomisk information), innehåller initiala data och kunskaper om det kontrollerade objektet vid inställning av det optimala styrproblemet osäker eller otydlig information som inte kan bearbetas av traditionella kvantitativa metoder. I sådana fall kan du använda optimala kontrollalgoritmer baserade på den matematiska teorin om fuzzy sets (Fuzzy control). Begreppen och kunskapen som används omvandlas till fuzzy form, fuzzy regler för att härleda beslut bestäms, och sedan omvandlas de fuzzy besluten tillbaka till fysiska kontrollvariabler.
Optimalt kontrollproblem
Låt oss formulera det optimala kontrollproblemet:
här är tillståndsvektorn - kontroll, - de första och sista ögonblicken i tiden.
Det optimala kontrollproblemet är att hitta tillstånds- och kontrollfunktioner för tid som minimerar funktionaliteten.
Variationskalkyl
Låt oss betrakta detta optimala kontrollproblem som ett Lagrangeproblem i variationskalkylen. För att hitta de nödvändiga förutsättningarna för ett extremum tillämpar vi Euler-Lagrange-satsen. Lagrange-funktionen har formen: , var finns randvillkoren. Lagrangen har formen: , där , , är n-dimensionella vektorer av Lagrange-multiplikatorer.
De nödvändiga villkoren för ett extremum, enligt detta teorem, har formen:
Nödvändiga förhållanden (3-5) ligger till grund för att bestämma optimala banor. Efter att ha skrivit dessa ekvationer får vi ett tvåpunktsgränsproblem, där en del av randvillkoren specificeras vid det inledande ögonblicket och resten i det sista ögonblicket. Metoder för att lösa sådana problem diskuteras i detalj i boken.
Pontryagins maximiprincip
Behovet av Pontryagin-maximumprincipen uppstår i det fall när det inte är möjligt att uppfylla det nödvändiga villkoret (3), nämligen .
I detta fall ersätts villkor (3) med villkor (6):
(6)I det här fallet, enligt Pontryagins maximiprincip, är värdet för optimal kontroll lika med värdet för kontroll vid en av ändarna av det tillåtna området. Pontryagins ekvationer skrivs med Hamilton-funktionen H, definierad av relationen. Av ekvationerna följer att Hamiltonfunktionen H är relaterad till Lagrangefunktionen L enligt följande: . Genom att ersätta L från den sista ekvationen i ekvationerna (3-5) får vi de nödvändiga villkoren uttryckta genom Hamilton-funktionen:
Nödvändiga villkor skrivna i denna form kallas Pontryagin-ekvationer. Pontryagins maximiprincip diskuteras mer ingående i boken.
Var används den?
Maximiprincipen är särskilt viktig i styrsystem med maximal hastighet och minimal energiförbrukning, där man använder relästyrningar som tar extrema snarare än mellanliggande värden inom det tillåtna reglerintervallet.
Berättelse
För utvecklingen av teorin om optimal kontroll L.S. Pontryagin och hans medarbetare V.G. Boltyansky, R.V. Gamkrelidze och E.F. Mishchenko tilldelades Leninpriset 1962.
Dynamisk programmeringsmetod
Den dynamiska programmeringsmetoden bygger på Bellmans optimalitetsprincip, som är formulerad enligt följande: den optimala styrstrategin har egenskapen att oavsett initialtillstånd och styrning i början av processen så måste efterföljande styrningar utgöra en optimal styrstrategi relativt tillstånd som erhållits efter det inledande skedet av processen. Den dynamiska programmeringsmetoden beskrivs mer i detalj i boken
Anteckningar
Litteratur
- Rastrigin L.A. Moderna principer för att hantera komplexa objekt. - M.: Sov. radio, 1980. - 232 s., BBK 32.815, streck. 12000 exemplar
- Alekseev V.M., Tikhomirov V.M. , Fomin S.V. Optimal kontroll. - M.: Nauka, 1979, UDC 519.6, - 223 s., streck. 24000 exemplar
se även
Wikimedia Foundation. 2010.
Se vad "Optimal kontroll" är i andra ordböcker:
Optimal kontroll- OU-kontroll som ger det mest fördelaktiga värdet av ett visst optimalitetskriterium (OC), som kännetecknar kontrollens effektivitet under givna restriktioner. Olika tekniska eller ekonomiska... ... Ordboksuppslagsbok med termer för normativ och teknisk dokumentation
optimal kontroll- Ledning, vars syfte är att säkerställa extremvärdet av ledningskvalitetsindikatorn. [Samling av rekommenderade termer. Nummer 107. Management Theory. USSR:s vetenskapsakademi. Kommittén för vetenskaplig och teknisk terminologi. 1984] … … Teknisk översättarguide
Optimal kontroll- 1. Grundkonceptet för den matematiska teorin om optimala processer (tillhör grenen av matematik under samma namn: "O.u."); betyder valet av kontrollparametrar som skulle ge det bästa från punkten av... ... Ekonomisk och matematisk ordbok
Tillåter, under givna förutsättningar (ofta motsägelsefulla), att till exempel nå målet på bästa möjliga sätt. på kortast möjliga tid, med den största ekonomiska effekten, med maximal noggrannhet... Stor encyklopedisk ordbok
Flygplan är en del av flygdynamik som ägnas åt utveckling och användning av optimeringsmetoder för att bestämma lagarna för rörelsekontroll för flygplanet och dess banor som ger maximalt eller minimum av det valda kriteriet... ... Encyclopedia of technology
En gren av matematiken som studerar icke-klassiska variationsproblem. Föremål som tekniken hanterar är vanligtvis utrustade med "roder", med deras hjälp styr en person rörelse. Matematiskt beskrivs beteendet hos ett sådant objekt... ... Stora sovjetiska encyklopedien